


Torsi sinkron Mesin bending hidrolik
1. Struktur mekanik utama alat mesin terdiri dari bingkai, kolom, penggeser, meja kerja, silinder utama, pembawa belakang, dan bagian lainnya. Melalui analisis elemen hingga dan desain optimasi oleh perangkat lunak tiga dimensi, kekuatan struktural dan kekakuan setiap komponen utama dapat dipastikan sepenuhnya.
2. Tekanan internal dari bagian yang dilas dapat dihilangkan dengan tempering dan penuaan getaran
3. Bahan pelumasan sendiri digunakan pada cara panduan alat mesin sehingga tidak perlu sering pelumasan dan perawatan
4. Struktur transmisi alat mesin mengadopsi desain lentur dinamis atas untuk memastikan kebisingan rendah dan kondisi kerja yang stabil, titik mati bawah dapat menangguhkan dan menahan tekanan untuk memastikan keakuratan benda kerja
5. Penyesuaian stroke blok mekanis dan pembawa belakang dikendalikan oleh motor biasa, yang digerakkan oleh transformator frekuensi atau penggerak servo menggunakan sistem NC. Pemosisiannya dapat tepat dan andal, dan nyaman untuk menyesuaikan dan mengontrol
6. Kotak listrik dilengkapi dengan perangkat interlock elektromekanis. Itu dapat memotong daya listrik untuk melindungi keselamatan pribadi secara otomatis ketika pintu terbuka
7. Sakelar kaki yang dapat dipindahkan mudah dioperasikan.
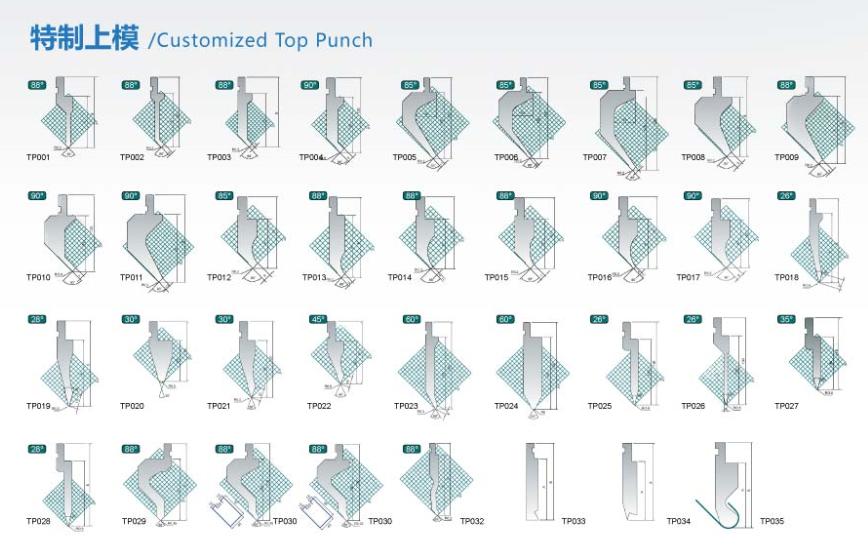
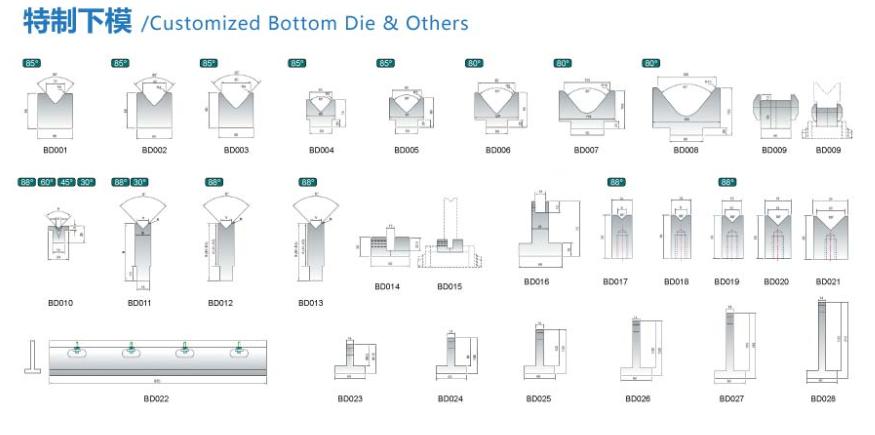
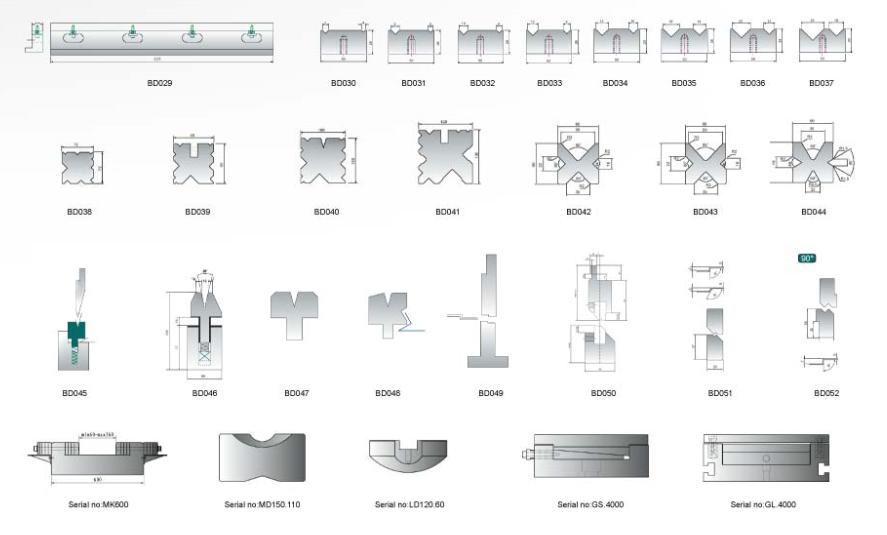
8. Satu set alat standar disediakan dengan setiap mesin.
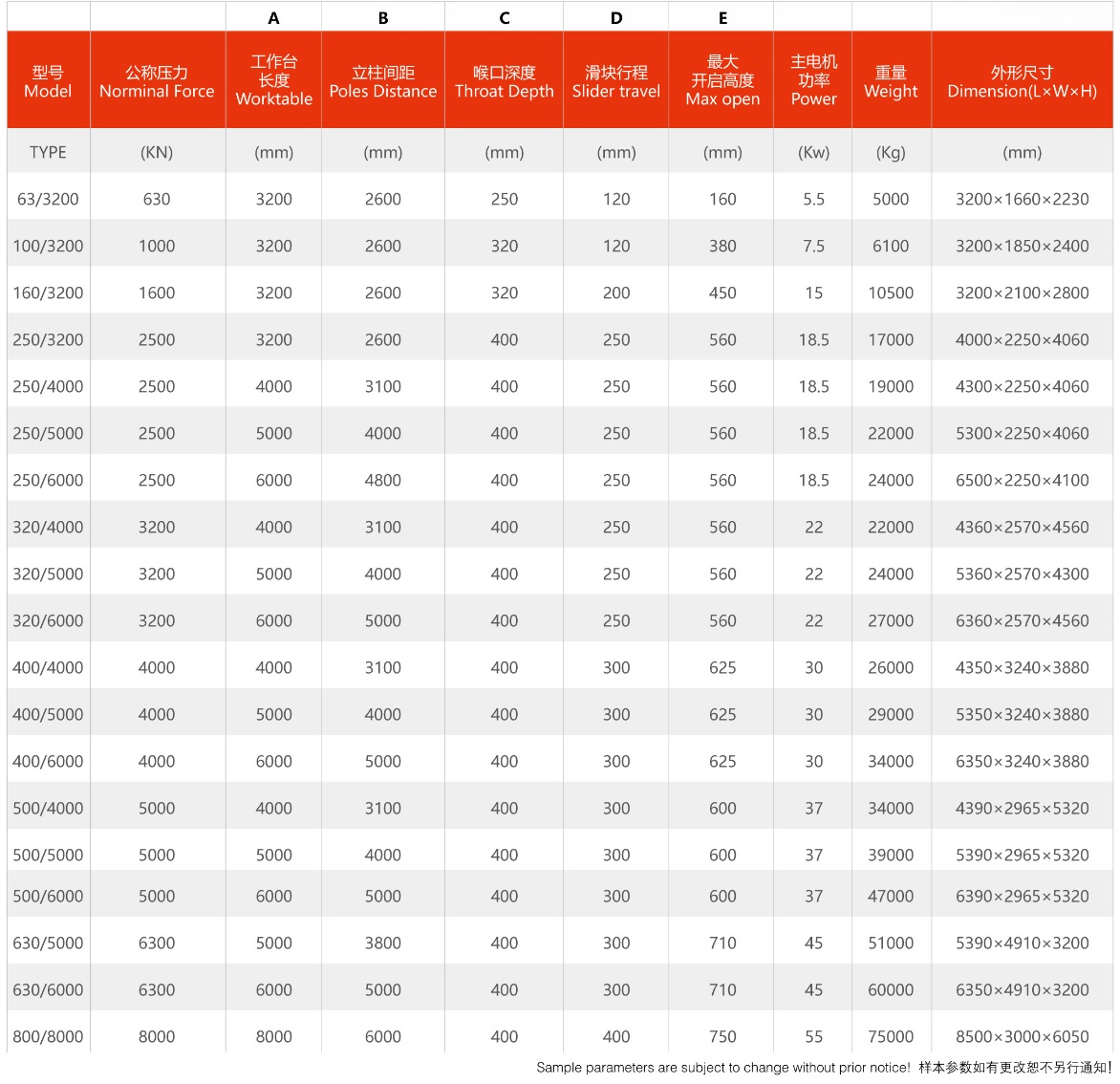
Parameter Teknis
Fitur utama
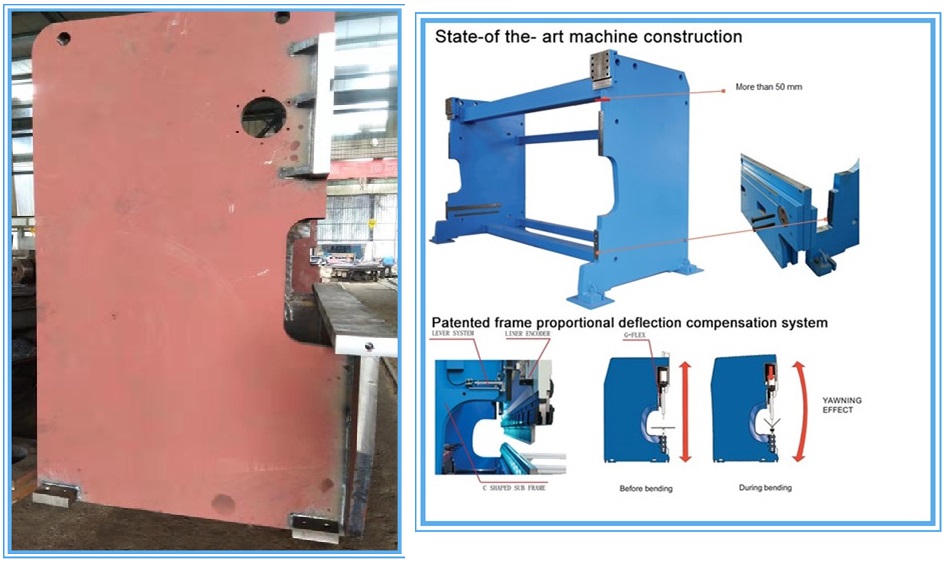
Seluruh mesin berada dalam struktur lembaran yang dilas, dengan tegangan internal dihilangkan oleh teknologi penuaan getaran, kekuatan tinggi dan kekakuan mesin yang baik. Umur panjang mesin dipastikan.
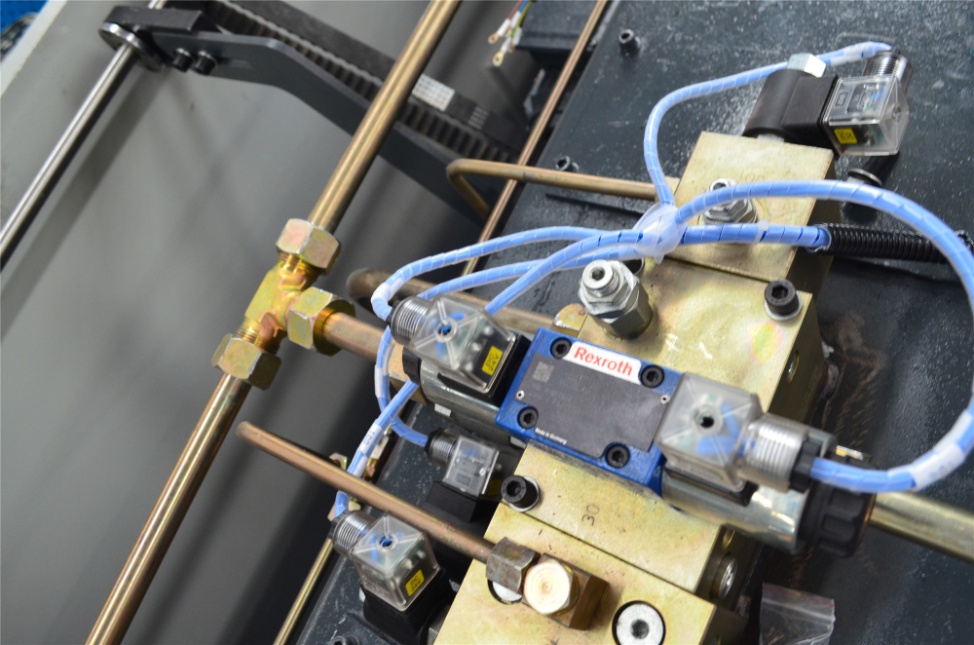
● Sistem hidraulik dengan perlindungan keselamatan kelebihan beban
● Tampilan level oli yang jernih dan intuitif secara hidraulik
● Mesin dapat bekerja terus menerus di bawah beban terukur
● sistem hidraulik mengurangi sambungan pipa, kebocoran oli, dan meningkatkan stabilitas dan mempercantik keseluruhan
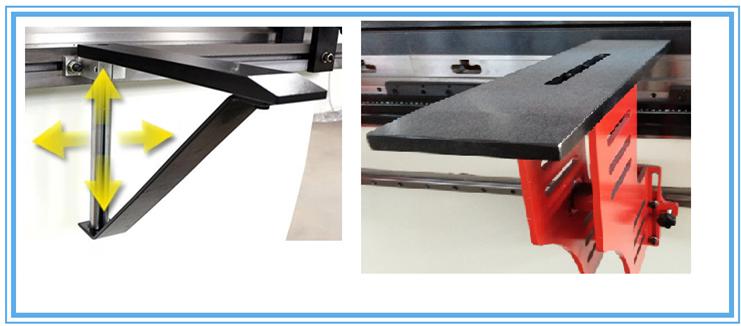
Lengan depan struktur ganda adalah kekakuan yang lebih tinggi, daya dukung yang unggul. Itu dapat disesuaikan ke atas dan ke bawah atau bergerak di sepanjang meja kerja dari sisi ke sisi
Pengontrol opsional

Produk-produk terkait
 9 Axis Electro-hydraulic Synchronous CNC Hydraulic Press Brake Machine dengan DA66T
9 Axis Electro-hydraulic Synchronous CNC Hydraulic Press Brake Machine dengan DA66T- Mesin Rem Tekan Hidrolik DA66T CNC
- Mesin Lipat Mesin Bending Hidrolik dengan DA41
- Lembaran Logam Mesin Rem Tekan Rem Hidrolik CNC Otomatis
- Rem Tekan CNC / Mesin Lipat / Mesin Bending dengan CT8
- Rem Tekan Tandem Hidrolik
- lembaran kecil logam plat hidrolik tekan rem harga mesin bending
- electro-hydraulic cnc hydraulic steel bender sink press brake machine
- DA53T CNC Mesin Bending Profil Baja Elektro-hidraulik
- Rem Tekan Hidrolik Untuk Baja Tahan Karat









