1. Prinsip struktural yang berbeda
Prinsip desain kedua model berbeda, menghasilkan struktur yang berbeda untuk memastikan sinkronisasi di kedua sisi penggeser lentur. Mesin bending sumbu torsi menggunakan sumbu torsi untuk menghubungkan batang ayun kiri dan kanan untuk membentuk sumbu torsi memaksa mekanisme sinkronisasi untuk bergerak ke atas dan ke bawah silinder di kedua sisi, sehingga mesin bending sinkronisasi sumbu torsi adalah metode sinkronisasi paksa mekanis , dan paralelisme penggeser tidak dapat diperiksa secara otomatis mediasi otomatis.
Mesin pembengkok sinkron elektro-hidraulik adalah memasang skala magnetik (optik) pada penggeser dan pelat dinding. Sistem kontrol numerik dapat menganalisis sinkronisasi kedua sisi penggeser melalui informasi umpan balik skala magnetik (optik) kapan saja. Jika ada kesalahan, sistem kontrol numerik akan menyesuaikan melalui katup servo elektro-hidraulik proporsional untuk menyinkronkan stroke di kedua sisi slider. Sistem kontrol numerik, grup katup kontrol hidraulik, dan skala magnetik merupakan kontrol loop tertutup umpan balik dari mesin bending sinkron elektro-hidraulik.

2. Presisi
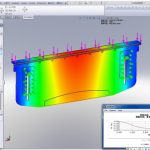
Paralelisme penggeser menentukan sudut benda kerja. Mesin bending sinkron sumbu torsi secara mekanis mempertahankan sinkronisasi slider, tanpa umpan balik kesalahan waktu nyata, dan mesin itu sendiri tidak dapat melakukan penyesuaian otomatis. Selain itu, kapasitas beban parsialnya buruk (mesin bending sinkron sumbu torsi menggunakan sumbu torsi untuk memaksa mekanisme sinkronisasi untuk menggerakkan silinder di kedua sisi ke atas dan ke bawah. Jika beban parsial jangka panjang akan menyebabkan sumbu torsi berubah bentuk. .), mesin bending sinkron elektro-hidrolik adalah sistem melalui listrik proporsional. Grup katup cair mengontrol sinkronisasi penggeser, dan skala magnetik (optik) memberikan umpan balik kesalahan waktu nyata. Jika ada kesalahan, sistem akan menyesuaikan melalui katup proporsional untuk menjaga sinkronisasi penggeser.
3. Kecepatan
Ada dua titik kerja mesin yang menentukan kecepatan larinya: (1) kecepatan slider, (2) kecepatan backgauge, (3) langkah bending.
Mesin bending sinkron sumbu torsi menggunakan silinder 6:1 atau 8:1, yang lambat, sedangkan mesin bending sinkron elektro-hidraulik menggunakan silinder 13:1 atau 15:1, yang cepat. Oleh karena itu, kecepatan turun yang cepat dan kecepatan kembali dari mesin bending sinkron elektro-hidraulik jauh lebih tinggi daripada mesin bending sinkron torsi.
Ketika penggeser mesin bending sinkron sumbu torsi bergerak ke bawah, meskipun kecepatan memiliki fungsi cepat dan lambat, kecepatan turun dan kembali hanya 80mm/s, dan perpindahan cepat dan lambat tidak mulus. Kecepatan lari backgauge hanya 100mm/s.
Jika benda kerja perlu ditekuk dalam beberapa langkah, setiap proses mesin bending sinkron sumbu torsi harus diatur secara terpisah, dan proses pemrosesannya sangat rumit. Namun, mesin sinkron elektro-hidraulik dapat mengatur dan menyimpan proses setiap langkah melalui komputer, dan dapat dioperasikan terus menerus, yang sangat meningkatkan kecepatan langkah pembengkokan dan meningkatkan efisiensi kerja.
Ketika penggeser mesin bending sinkron elektro-hidraulik turun, kecepatan memiliki fungsi cepat dan lambat. Kecepatan turun dan kembali yang cepat dapat mencapai 200mm / s, dan konversi cepat dan lambat lancar, yang dapat sangat meningkatkan efisiensi produksi. Pada saat yang sama, kecepatan lari backgauge mencapai 300mm/s.
4. Kekuatan
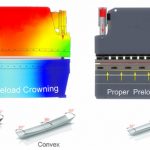
Karena desainnya sendiri, mesin bending sinkron torsi tidak dapat menekuk di bawah beban eksentrik. Jika dibengkokkan di bawah beban eksentrik untuk waktu yang lama, itu akan menyebabkan poros torsi berubah bentuk. Mesin bending CNC sinkron elektro-hidraulik tidak memiliki masalah seperti itu. Sumbu Y1 dan Y2 di sisi kiri dan kanan beroperasi secara independen, sehingga dapat ditekuk di bawah beban parsial. Efisiensi kerja mesin bending sinkron elektro-hidraulik dapat setara dengan dua hingga tiga mesin bending sinkron sumbu torsi.
Produk-produk terkait
 Prinsip Kerja dan Komposisi Mesin Bending Rem Tekan CNC
Prinsip Kerja dan Komposisi Mesin Bending Rem Tekan CNC- Mengapa Menambahkan Sistem Kompensasi ke Mesin Bending Rem Tekan
- Perbandingan dan Pemilihan Sistem CNC Rem Tekan
- 4 Langkah untuk Mengetahui Sistem E21 dari CNC Sheet Metal Bender
- Cara Membuat Kompensasi Defleksi untuk Bender Lembaran Logam CNC
- Bengkel hidrolik tekanan hidrolik terlaris tekan hidrolik tekan ton hidrolik
- Rem Tekan Cina 40 Ton
- Aturan Operasi Aman dari Mesin Press Tenaga Hidrolik
- Solusi Efisien WILA untuk Membungkuk Pelat Sedang dan Tebal
- Kegagalan Mekanik Umum dan Pemeliharaan Mesin Bending Rem Tekan